This file defines HFL cameras data and custom types. More...
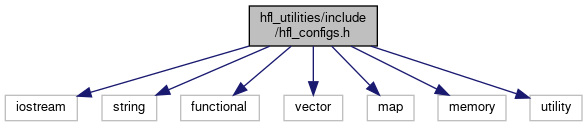
#include <iostream>#include <string>#include <functional>#include <vector>#include <map>#include <memory>#include <utility>
Include dependency graph for hfl_configs.h:
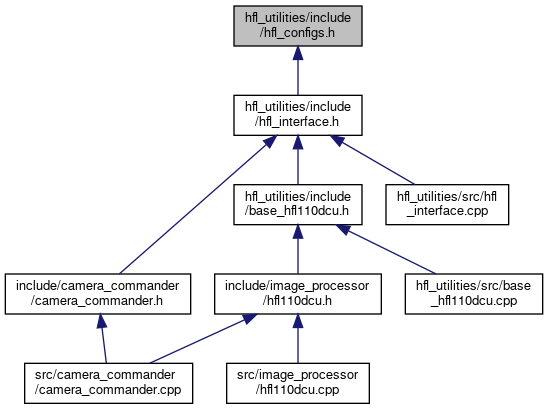
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| hfl | |
Typedefs | |
| using | hfl::Attribs_map = std::map< std::string, float > |
| Mode parameters map. More... | |
| using | hfl::Configs_map = std::map< std::string, Attribs_map > |
| Camera modes map. More... | |
| using | hfl::Setups_map = std::map< std::string, Configs_map > |
| HFL cameras map. More... | |
| using | hfl::Regs_bits_vec = std::vector< std::pair< std::string, int > > |
| Register bit's values vector. More... | |
| using | hfl::Registers_map = std::map< std::string, Regs_bits_vec > |
| Cameras registers map. More... | |
Variables | |
| const Configs_map | hfl::REGS_OFFSET_ADDRS |
| HFL cameras register addresses. More... | |
| const Setups_map | hfl::CAMERA_MODELS |
| HFL cameras memory maps and parameters. More... | |
| const Registers_map | hfl::MODE_REGISTERS |
| HFL cameras mode registers. More... | |
Detailed Description
This file defines HFL cameras data and custom types.