This file defines the HFL110DCU camera base class. More...
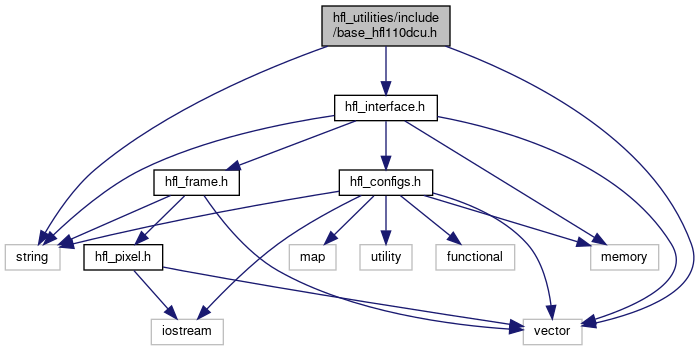
Include dependency graph for base_hfl110dcu.h:
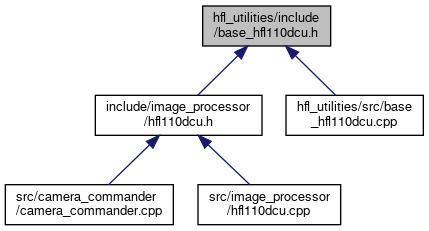
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hfl::BaseHFL110DCU |
| Base class for the HFL110DCU cameras. More... | |
Namespaces | |
| hfl | |
Variables | |
| const uint16_t | hfl::FRAME_ROWS { 32 } |
| Default frame rows. More... | |
| const uint16_t | hfl::FRAME_COLUMNS { 128 } |
| Default frame cols. More... | |
| const uint16_t | hfl::PIXEL_RETURNS { 1 } |
| Default frame cols. More... | |
| const uint16_t | hfl::PIXEL_SLICES { 128 } |
| Default frame cols. More... | |
| const uint32_t | hfl::WORDS_PER_PACKET { 0x168 } |
| Default words per UDP packet. More... | |
| const uint8_t | hfl::INTENSITY_BITS { 5 } |
| Default bits used for intensity. More... | |
| const uint8_t | hfl::RANGE_BITS { 8 } |
| Default bits used for range. More... | |
| const uint8_t | hfl::RANGE_PRECISION_BITS { 6 } |
| Default bits used for range presicion. More... | |
| const uint8_t | hfl::INTENSITY_PUBLISH_BITS { 12 } |
| Default bits used for intensity publishing. More... | |
| const char | hfl::FRAME_ID [] = "hfl110dcu" |
| Default frame ID. More... | |
| const char | hfl::CAMERA_INTRINSICS [] = "min000000" |
| Default camera intrinsics. More... | |
| const uint32_t | hfl::EXPECTED_ADDRESS { 0xffffffff } |
| Default expected memory address. More... | |
Detailed Description
This file defines the HFL110DCU camera base class.