This file defines the CameraCommander class. More...
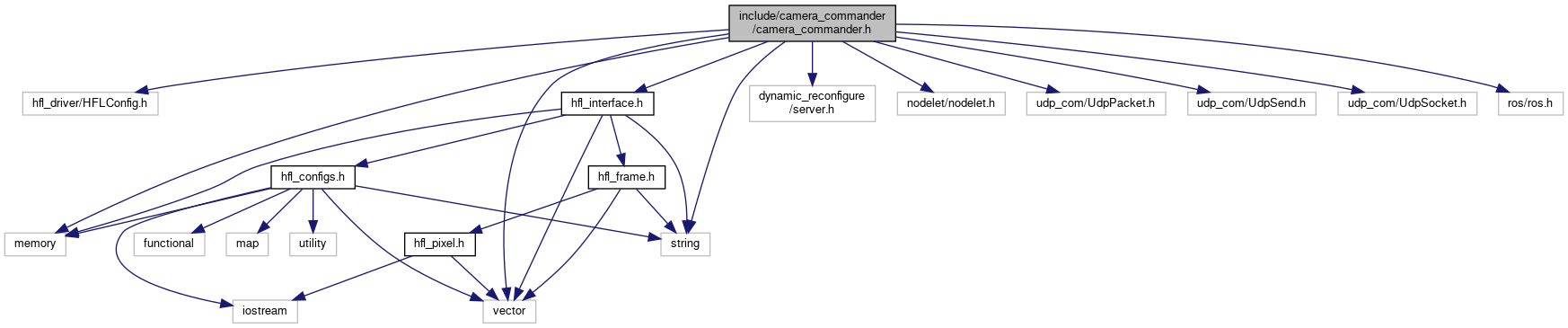
#include <hfl_driver/HFLConfig.h>#include <hfl_interface.h>#include <dynamic_reconfigure/server.h>#include <nodelet/nodelet.h>#include <vector>#include <string>#include <memory>#include "udp_com/UdpPacket.h"#include "udp_com/UdpSend.h"#include "udp_com/UdpSocket.h"#include "ros/ros.h"
Include dependency graph for camera_commander.h:
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| class | hfl::CameraCommander |
| Implements the camera configuration and setup. More... | |
Namespaces | |
| hfl | |
Enumerations | |
| enum | hfl::commander_states { hfl::state_probe = 0 , hfl::state_init , hfl::state_done , hfl::state_error } |
| Commander states enum. More... | |
| enum | hfl::error_codes { hfl::no_error = 0 , hfl::frame_socket_error , hfl::object_socket_error , hfl::lut_socket_error } |
| Error Codes. More... | |
Detailed Description
This file defines the CameraCommander class.